A while ago I got the idea to design a small STM32 development board similar to the popular “blue pill”. I had several aims for the project:
I wanted try out a couple of new parts which I was planning on using on the next revision of the power supply board.
I wanted to try out JLCPCB for board manufacture
I was keen to try panelizing a design
I also wanted to try using a SMD stencil and solder paste. Up until now I’ve hand assembled all my boards and as the part count goes up it does start to get a bit tiresome.
I decided to base the board on the same STM32F070CBT6 part that I’ve been using on the power supply project. It’s a pretty capble part and not too expensive.
I was aiming for a pretty small board size, not wanting to be any bigger than the “blue pill” boards. This combined with the fact that I wanted to bring out every pin on the micro-controller meant that the layout was reasonably tight. Initially I had wanted to keep all the parts on one side of the board but it just wasn’t possible. I ended up putting all the decoupling capacitors and the power regulator on the back side of the board. This helped with the layout issues, but it did make assembly more difficult as a result.
It took me several iterations, but in the end I was reasonably happy with the layout. It probably breaks a bunch of design rules but it seems to work OK. Unfortunately, I must have got distracted in the final stages while I was adding the silk screen for the pin names as about half of them are wrong (copy paste errors). Reminder to self to double check the silk screen labels before sending the next board out!
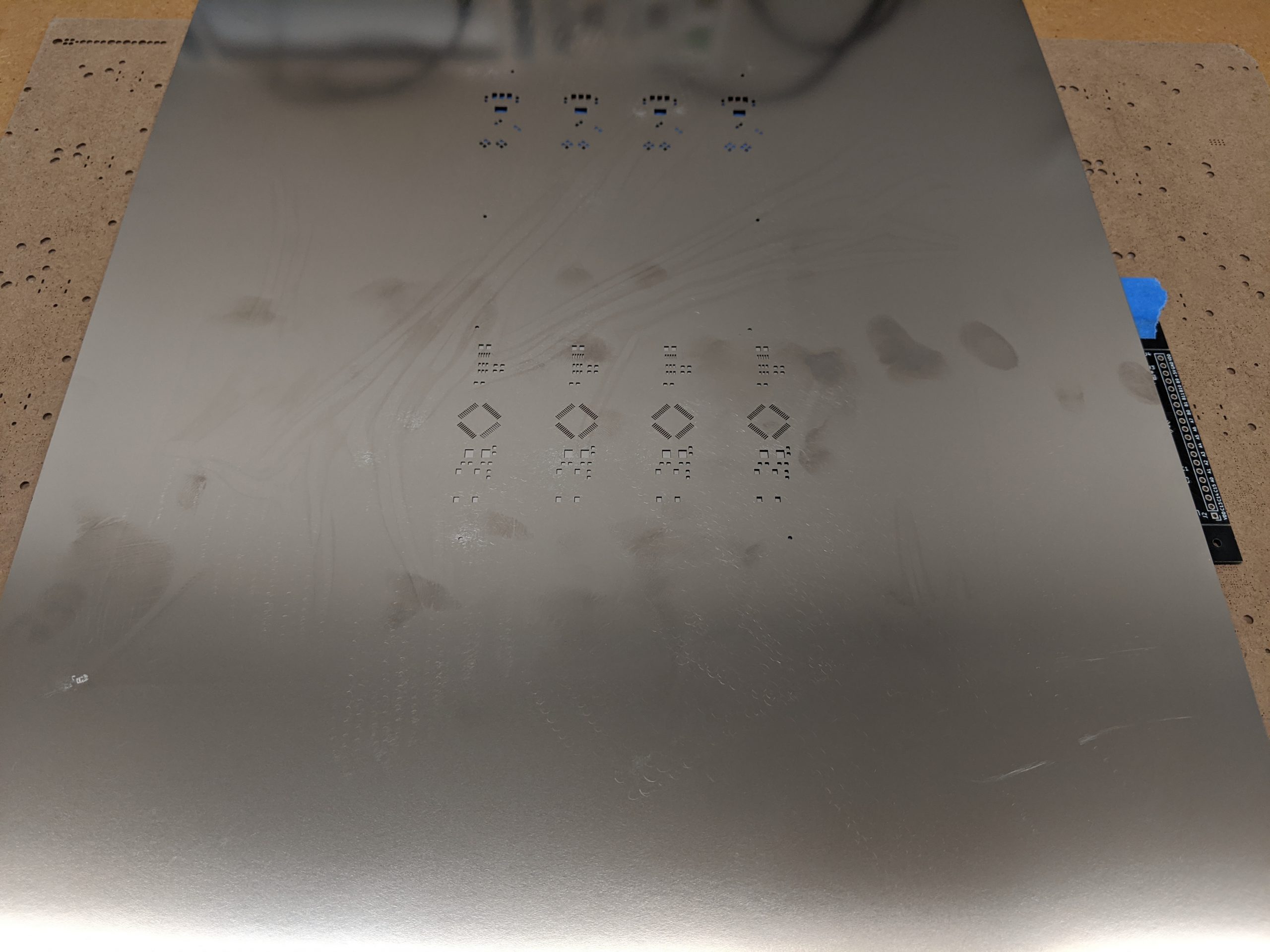
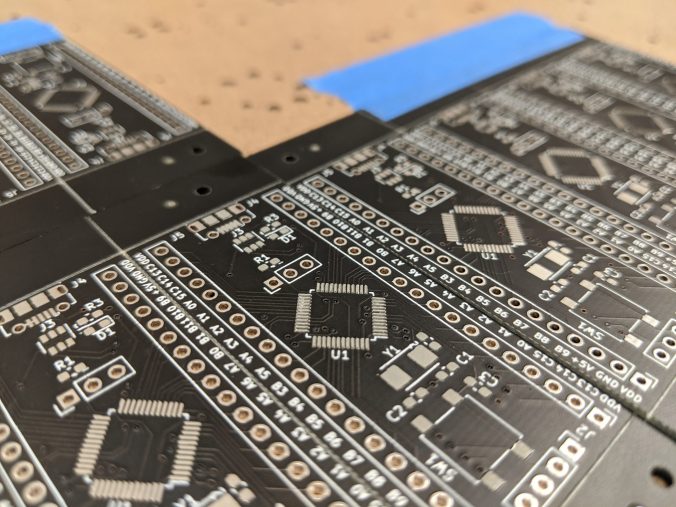
As mentioned earlier, I ordered the boards from JLCPCB as I was interested in trying their service. I used the “Panelize by JLCPCB” option to panelize the boards and managed to get four boards on the 10 x 10cm board size. I also used the option to get the stencil at the same time. Unfortunately due to COVID 19 delays with the shipping the boards took quite a while to arrive, and stencil didn’t arrive for another week after the boards.
Assembly was pretty straight forward using a hot air reflow. It worked well for these small boards, but I can imagine as the board size gets bigger it would become a less practical technique.
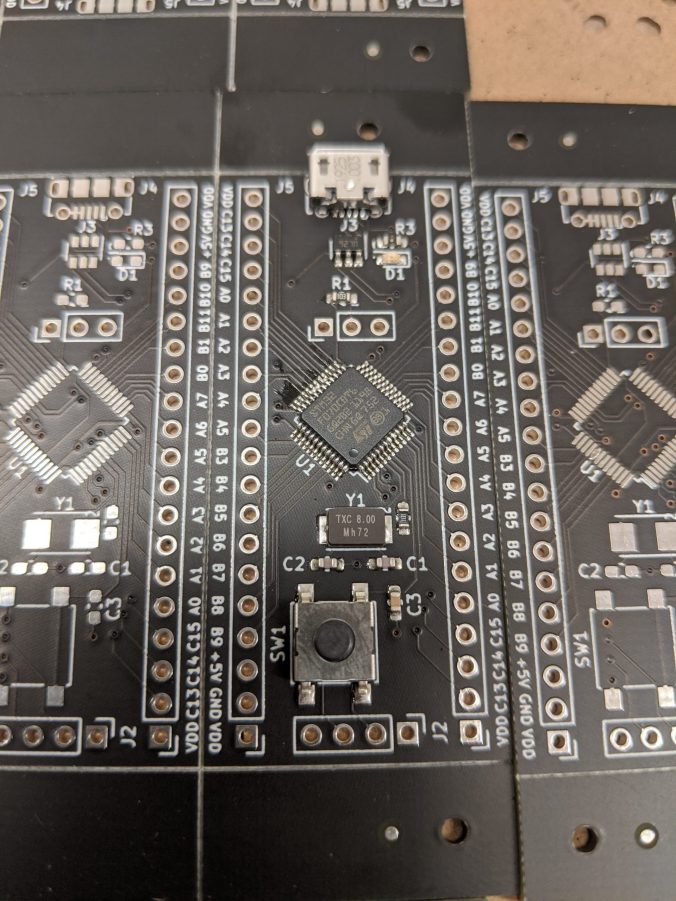
Reflowed using hot air
Paste applied using stencil
Parts placed
I assembled one board just to check that every thing would work and I hadn’t made any layout mistakes. It powers up and programs without issues so there are no obvious issues.
I’ve fixed the silk screen issues and you can get all the kicad files from this repo on gitlab.
In my last PSU project update I mentioned that the software functions I still had to prototype were:
PWM control of the FAN (Intel FAN control spec)
Dithering of DAC output
Temperature reading
I now have the FAN control implemented and am working on the DAC dithering and temperature reading. I’ve started work on the DAC dithering, and I have now managed to convince myself of how that is going to work. Gerry described the general approach quite well in his post here, but writing an actual implementation of a driver to take a 18 bit number and simulate that output on a 16 bit DAC took a bit of thinking. I’ll detail that further in a future post once I have the software done.
I also now have the LM35 temperature sensors, so hopefully prototyping that final outstanding piece of functionality is just a matter of finding the time to read the data sheet and write a driver.
Intel Fan Driver
The Intel Fan driver turned out to be more interesting to write than I initially anticipated. The speed control aspect is pretty straight forward, and simply entails generating a 25kHz PWM output and varying the duty cycle. For my particular fan I found that even with a 0% duty cycle the fan has a minimum speed of 1000 RPM.
The tachometer part of the driver required a bit more thought. The specification dictates that the fan needs to output two pulses per revolution. I initially went down a bit of a blind alley with the idea that I could use the input capture function of the SMT32 Timers to calculate the number of pulses being received per second. That approach quickly became complicated and after some time away from the keyboard and giving it some more thought with a clear head I realised it was as simple as configuring an GPIO input pin to interrupt each pulse, keep a running total of the pulses in the interrupt routine, and then using the Timer to interrupt each second and calculate the actual speed of the fan and reset the current count.
The following photo shows the board running the fan with the oscilloscope displaying the output pulses from the fan:
Fan output pulse trace on scope
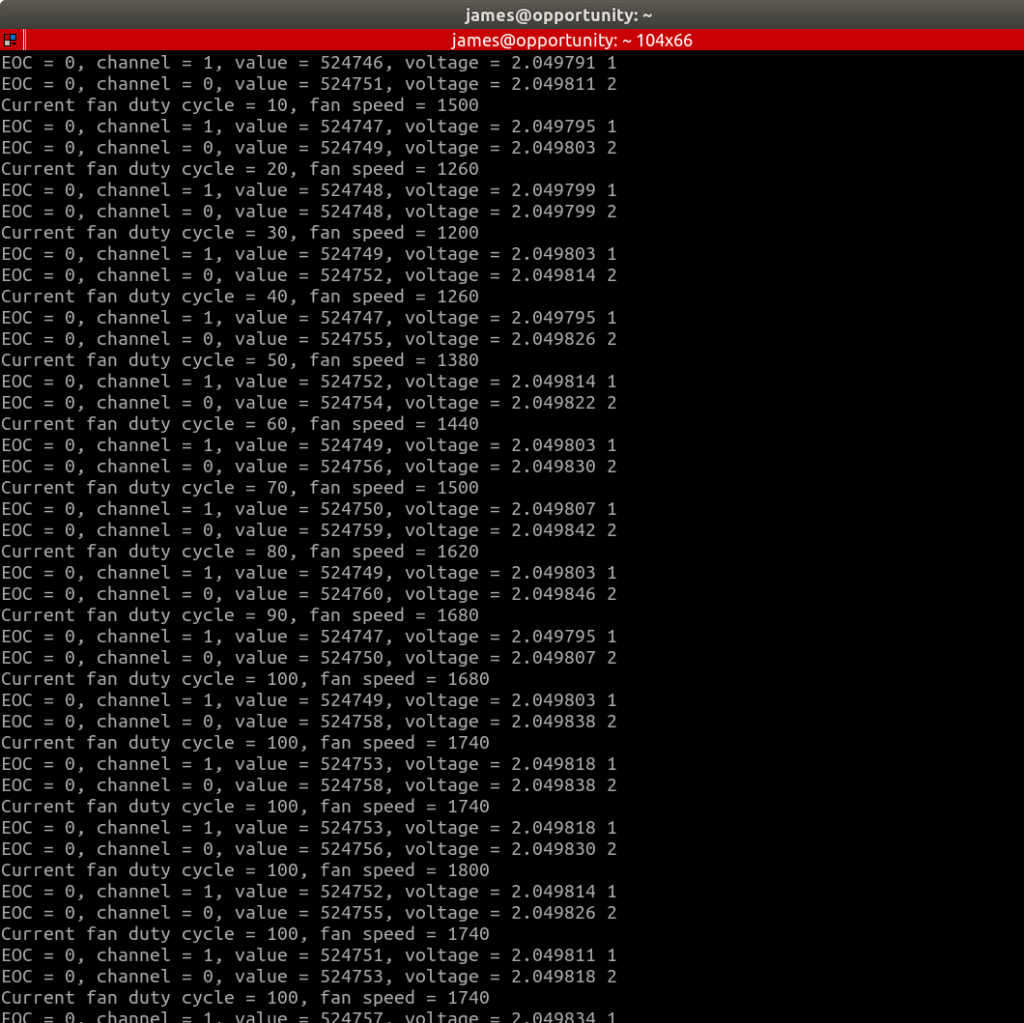
The current test software simply increments the output speed by 5% every seconds after the board starts up until it reaches 100%. The test program outputs the current fan speed to the UART each loop. The following screenshot shows the terminal output with the fan speed incrementing each loop (and the ADC reading back the current DAC output):
Console output showing fan speed
The software is using a fairly standard C driver approach. I have a struct which represents the hardware resources and state that needs to be tracked over time. This is the “fan” object. Then there are several functions that take a pointer to the fan struct and perform the functional operations such as calculating the current speed, or changing the output PWM to set the speed.
/*
* fan.h
*
* Created on: 25/07/2019
* Author: james
*
* The Fan class provides a driver for an Intel 4 wire CPU cooling fan.
* This class depends on two interrupt functions in stm32f0xx_it.c for the GPIO interrupt
* on the FAN_SENSE pin, and the timer interrupt to calculate the fan speed.
* The fan generates 2 pulses per revolution. The GPIO interrupt simply counts the pulses. A
* Timer interrupt every 1000 milliseconds will call the UpdateSpeed function to calculate
* the current fan speed in RPM.
*/
#include "stdint.h"
#include "tim.h"
#ifndef FAN_FAN_H_
#define FAN_FAN_H_
// The state structure for the fan.
typedef struct {
TIM_HandleTypeDef* pwm_handle;
uint32_t pwm_channel;
uint32_t tach_rpm;
uint32_t tach_count;
} fan_t;
HAL_StatusTypeDef Fan_Init(fan_t* fan);
HAL_StatusTypeDef Fan_SetDutyCycle(fan_t* fan, int8_t percentage);
HAL_StatusTypeDef Fan_UpdateSpeed(fan_t* fan);
uint32_t Fan_GetSpeed(fan_t* fan);
#endif /* FAN_FAN_H_ */
I’m using the ST CubeMX software to do all the configuration of the STM32 and generate the framework code. I have read a lot of negative sentiment about the ST HAL libraries and, if I’m being honest, I can be a bit of a purest and so I can understand where this comes from. However, for someone who wants to get a project up and running with a limited amount of time available, the CubeMX software and HAL libraries make implementing functionality significantly quicker than if I was rolling my own firmware using bare bones register programming. My one gripe though is that it does make your code quite fragmented. A good example of this is the timer configuration in the Fan driver.
When you configure peripherals using CubeMX it groups the configuration code for common peripherals together. You can also choose to have this code separated out into individual header and source files per peripheral. This is obviously better than everything being dumped in main.c, however it’s still not ideal, as when you are writing drivers your hardware configuration ends up being spread across different files with no obvious connection between them.
The only real solution to this appears to using the CubeMX software to do the initial configuration and code generation, but then move / refactor the generated code into your own driver files. Of course at this point you can no longer use the generate code function of CubeMX update the generated configuration. This of course is not ideal, but I think probably preferable to having functionality spread through a number of different source and header files. Time will tell….
It’s been a long time since my last update as I have a large number of pressures on my time and I much prefer working on my projects to writing about them!
Some progress has been made, although slower than I would like. Since my last update I have completed the assembly of two prototype control boards. The second was required because during some rework on the first board I managed to lift some pads on the tiny MSOP-8 footprint for the ADC. These pads are really very small, and it is very easy to put just a fraction to much heat into them and lift them from the FR4.
As a result of assembling the two boards I have learnt a number of lessons and identified several improvements for the next revision. Some of key lessons learned have been:
add test points for all important signals e.g. SPI lines
orient all ICs in same direction
add pin 1 indicator on silkscreen
add component value on silkscreen
Check, check and triple check the footprint matches the part you have ordered.
Point 5 above seems to be a common mistake, and all things considered I did pretty well for a first attempt. The footprint for my USBLC6-2SC6 was wrong, so USB will have to wait until the rev 2. board. One approach I have read of other people using to avoid these kinds of mistakes is printing the PCB one to one scale and laying the physical parts out on top to double check the footprints. I might try this before I send out my next board for manufacturing.
Firmware:
I’ve made good progress with the firmware development and have prototype code for the following functions:
Setting an output voltage using the DAC
Read back of the output voltage using the external ADC
Monitoring of the input voltage using the MCU ADC
Serial protocol for UART / USB interface
Rotary encoder reading for user input
ILI9341 320×240 TFT LCD display for user interface
Functions I have still to start are:
PWM control of the FAN (Intel FAN control spec)
Dithering of DAC output
Temperature reading
User interface:
The user interface has been an interesting challenge. To simplify the hardware in order to be able to focus just on the software I decided to use a temporary test platform using a “bluepill” development board which is a cheap STM32F103C8 based board available from Aliexpress for just a few dollars.
These little modules are really handy for mocking thing up on a breadboard and the STM32F103C8 is close enough to the STM32F070CBT6 part on my PSU controller that there is virtually no work required to port the code after prototyping. Here’s a picture of my prototype lashup with the ILI9341 TFT and rotary encoder attached.
Temporary UI development platform
The rotary encoder is the only UI input device at the moment. I may swap the TFT for a touch screen later depending how how this prototype goes, but navigating about using just the rotary encoder seems to work well enough for now.
The UI is based on a simple state machine. The user uses the rotary encoder to scroll through the various options VSET -> VCTRL -> CSET -> CCTRL, and uses the push button function on the encoder to select an option. They can then set the required voltage output in VSET state, or current output in CSET state. The encoder driver has “velocity control” built into it, so slow turns will increment the voltage in millivolt steps, slightly faster turns in 100mv steps and very fast turns in 1v steps, and similarly for the current control function.
Here is a short video of the UI in action:
Prototype PSU User Interface
As you can see I still have some issues to resolve with the fonts. Getting nice fonts to work was a challenge requiring reducing font files down to just the font sizes, and even characters I need to save space.
Final steps with the UI for now will be to integrate that code back into the main PSU firmware project, and figure out which SPI device – DAC or ADC – makes the most sense to share a SPI bus with the TFT screen.
It’s been a while since my last update on this project. This has largely been due to a month or so of big weeks at work delivering to a project deadline, and lots of family commitments in my personal time. Work is returning to normal now, so I’m hoping to sneak in a bit of progress on this and another couple of projects before the Christmas madness hits.
I’ve pretty much finished the board assembly now. I’ve just been waiting on the replacement 74HC4053 chips as I had mistakenly ordered SOIC wide i.e. 7.9mm wide instead of the standard 3.9mm wide SOIC in my first digikey order – doh!
Putting together this last Digikey order was a huge task. I feel like I need to find a better process / workflow for managing my BOM. It was quite a complicated process to keep track of what parts I need, for this revision, vs what was in the original BOM, minus what I have in stock… There must be an easier way than the spreadsheet/filter nightmare I’ve just been through so if anyone has suggestions please let me know!
Here is the board in it’s current state:
Mostly assembled board
I have a bunch of firmware development tasks I can work on with this revision:
PWM control of the FAN (Intel FAN control spec)
Dithering of DAC output
Read back of the output voltage using the external ADC
Monitoring of the input voltage using the MCU ADC
Temperature reading
Serial protocol for UART / USB interface
Rotary encoder reading for user input
ILI9341 320×240 TFT LCD display for user interface
Hopefully I should be able to get the bulk of of the firmware development done with the rev 0.1 board. In parallel I’m going to start laying out rev 0.2 which will include the full regulator for the low voltage (8V at up to 8A) version.
I had initially thought that I may have to do a couple of prototypes of just the digital control portion before I started on the full board including the analog regulator circuit. However, I now think I may be able to get away with just the one version. Time will tell once I have got further into the firmware development.
One thing I have now realised is that I have messed up some of the pin allocations for the STM32 in rev 0.1 as some of the functions have conflicts. Hopefully I’ll be able to move some of the allocations around a bit and be able to stick with the STM32F070CBT6 part and not have to move up to a higher pin count device. I have a few unallocated pins to play with and could potentially move the DAC and ADC to the same SPI master if I need to recover more, so I have some ideas about how to tackle this issue.
My Programmable PSU rev 0.1 boards have been a great learning experience so far, which is exactly what I expected and hoped for. I’ve already accumulated a ton of lessons learned from the process and rev 0.2 will hopefully be a significant improvement and get me well down the path to the final product. Over the past couple of weeks I have watched a bunch of videos about PCB layout in general, and Kicad in particular and now feel much better informed and armed for tackling rev 0.2. Some of the key lessons learned so far are:
Decoupling caps need to be right next to the IC
Build logical groups of components (generally matching functional blocks in your schematic) and lay those out individually before bringing everything together as a whole.
Use larger traces for power
Use a copper fill if necessary to help with heat dissipation
Be careful USB – it requires differential pairs that need to be carefully handled.
If you can fit component values on your silkscreen – do it. It makes assembly a lot easier than having to constantly refer to a schematic to check values
Item #4 above relates to the LM317 regulator I am using to convert down from the 12v input to a 3.3v supply for the STM32. I am using the SOIC-8 package version of this device, and it gets hot. It has 4 output pins and I have only connected one of them. One thing I will definitely do next time is connect all four pins together with as large a copper fill as possible between the pins underneath the chip. This should go someway to helping with the heat dissipation.
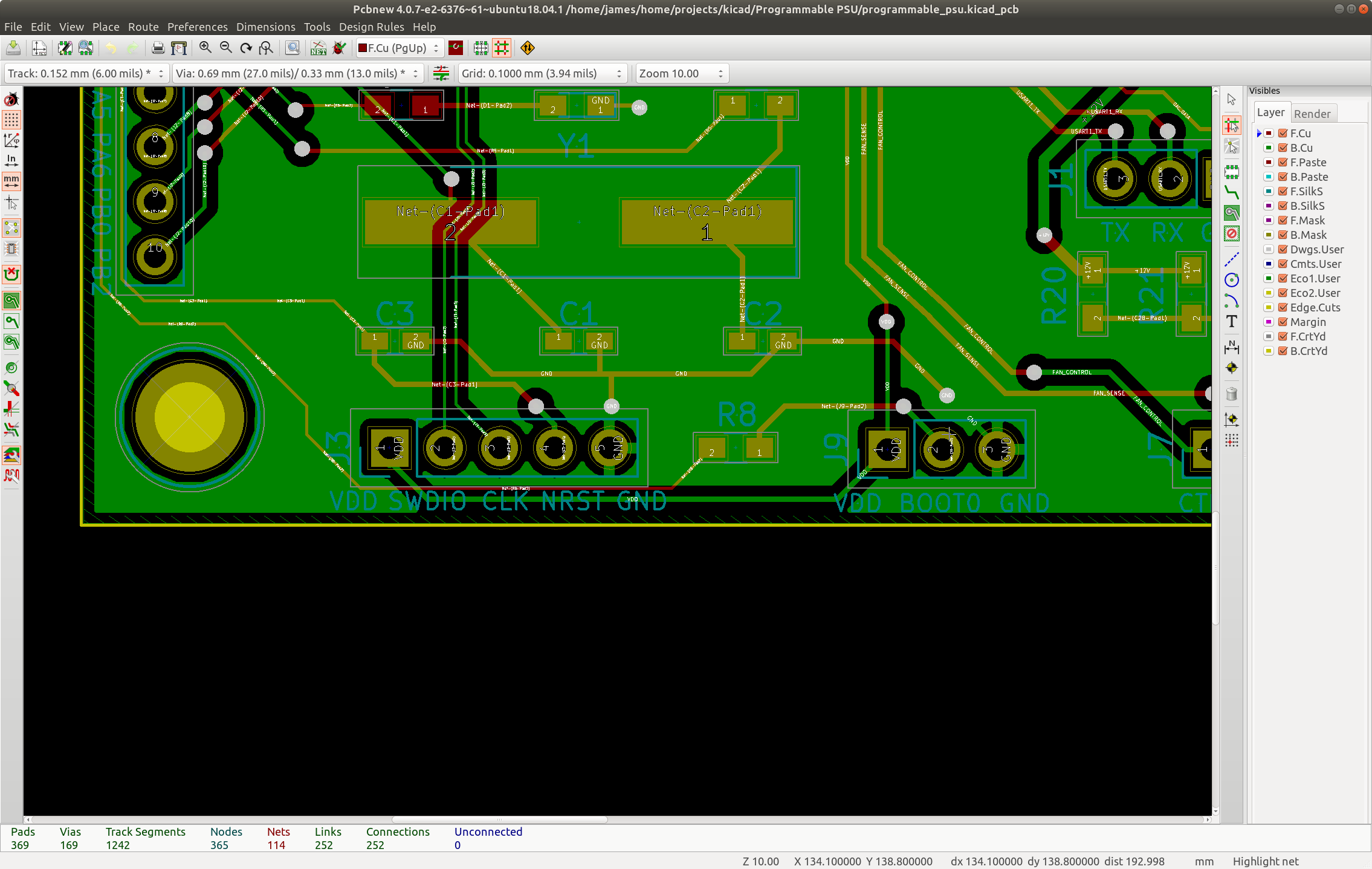
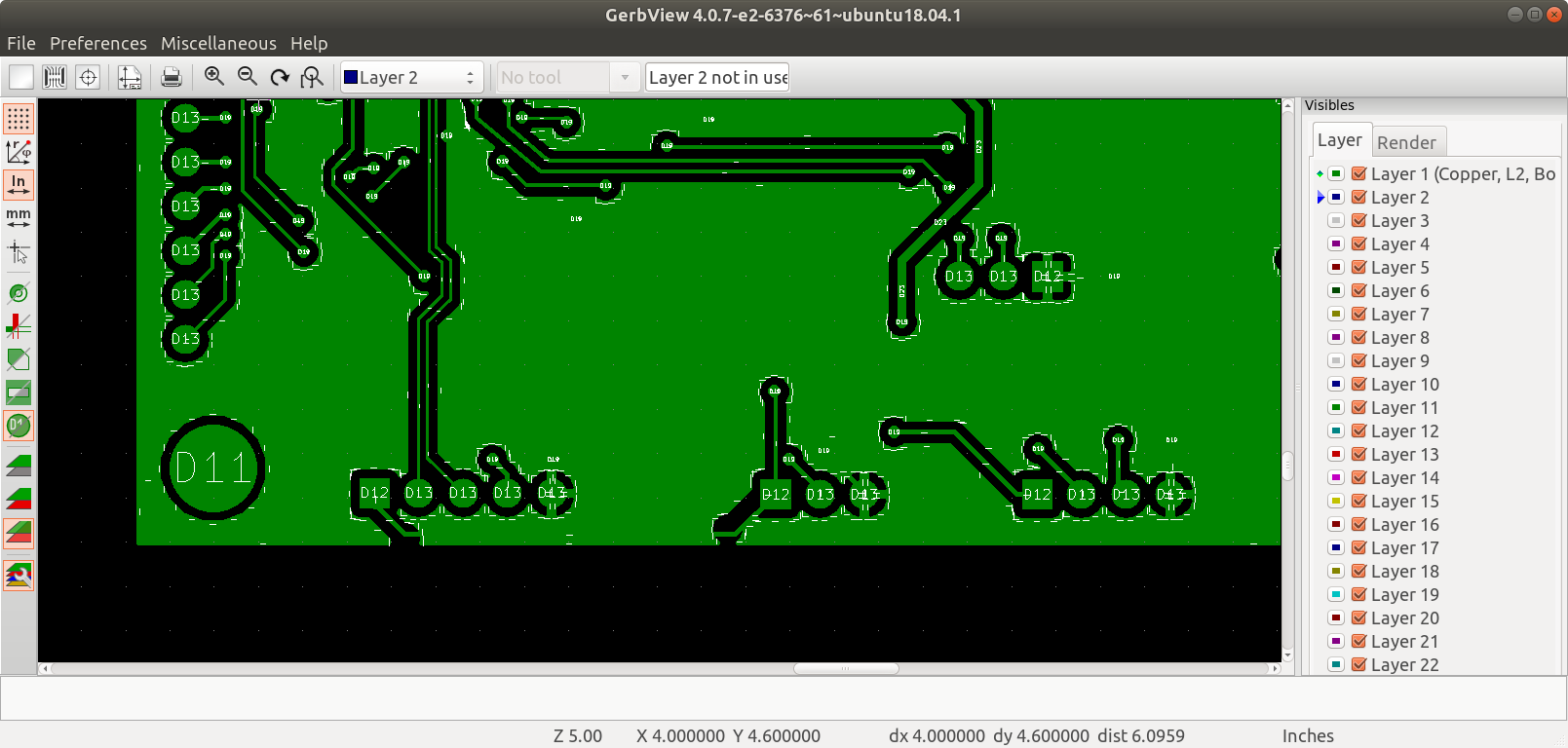
I learned one particularly hard lesson about Kicad and making sure you re-draw the copper fills before generating your gerber files. You can read my debugging journey on this reddit thread. Once I had figured out what had gone wrong I tweeted about it and got some great advice back. Apparently this has been fixed in Kicad 5 where you can select an option to check zone fills before plotting – clearly I wasn’t the first person to be bitten by this issue!
Unfortunately though it resulted in a couple dead shorts on the board where VDD was connected directly to GND e.g.:
This is what I saw in pcbnew.
This is what the generated gerber file looks like.
Some judicious cuts with a craft knife and the boards are salvageable which is fortunate. Ultimately they were just intended to prove the digital control portion of the design using the STM32F070CBT6 which I should still be able to achieve with the rev 0.1 design.
After spending more time than I care to admit on figuring out the previous problem, I then had to diagnose why my STM32 kept hanging every time it got to the SystickHandler. Long story short I had jumpered BOOT0 to VDD instead of GND – won’t be making that mistake again either!
So, after all that I finally had a booting board and here is a blinky video to prove it: